L1 규제, L2 규제
이전에 과대 적합을 해결하는 대표적인 방법 중 하나로 가중치 규제(regularization)을 언급하였다.
가중치 규제 :
가중치 값이 커지지 않도록 제한하는 방법
가중치 값이 커지지 않게하면 왜 과대 적합을 해결할까??
가중치 규제를 하면 모델의 일반화 성능이 올라가게 되기 떄문이다
좀 더 구체적으로 알아보자.

위 그래프 중 두 선(빨강, 파란 선) 모두 점을 적당히 잘 나타내고 있다.
그런데 두 선 중 어떤 선을 나타내는 모델이 더 성능이 좋을까??
이 경우 경사가 급한 그래프보다는 경사가 완만한 선(파란선)을 나타내는 모델이 성능이 더 좋다고 평가한다.
그 이유는 경사가 높은 선 보다 경사가 낮은 선이 보라색 박스로 표시한 샘플 데이터를 더 잘 표현하기 때문이다.

그럼 위 그래프와 같이 점에 대해 거의 완벽히 표현하는 선, 즉 샘플 데이터에 딱 맞는 그래프는 어떤지 생각해보자
당연히 샘플 데이터에 딱 맞는 그래프는 성능도 최고 아닌가?
그렇면 보라색 박스의 데이터가 샘플 데이터에 추가했다 생각해보자..
이전 샘플 데이터에 너무 딱 맞는 선을 모델이 나타내고 있기 떄문에 새로운 데이터를 제대로 표현하지 못하고 있다.
->즉 모델이 몇 개의 데이터에 너무 집착해버리면 새로운 데이터에 적응을 못하여 좋은 성능을 가질 수 없다.
-> 이것을 모델이 일반화되지 않았다 라고 말한다.
이런 경우에는 어떻게 해결해야 할까??
-> 규제를 사용하여 가중치를 제한하면 모델이 몇 개의 데이터에 집착하지 않게 되므로 일반화 성능을 높일 수 있다.
앞으로 대표적인 규제 기법인 L1 규제, L2 규제에 대해 알아보고 두 기법을 이전에 구현한 SingleLayer 클래스에 적용해보려고 한다.
또한 규제를 적용하면 손실 함수의 그래프가 어떻게 변하는지도 알아보자.
L1 규제 :
손실 함수에 가중치의 절댓값인 L1 노름(norm)을 추가한다.
L1 norm을 나타내면 아래와 같다
$||w||1 = \sum{i = 1}^{n} |w_i|$
L1 norm인 n : 가중치 갯수를 의미 -> L1 규제를 가중치의 절댓값을 손실 함수에 더한 것으로 이해해도 괜찮음
이제 이 L1 규제를 로지스틱 손실 함수에 적용 해보자
먼저 로지스틱 손실 함수는
L = -(ylog(a) + (1 - y)log(1 - a))
이전에 말했듯 손실 함수에 가중치의 절댓값인 L1 norm을 추가하면 L1 규제가 만들어 진다고 했다.
그런데 단순히 L1 norm을 더하지 말고 규제의 양을 조절하는 파라미터 $\alpha$를 곱한 후 더하자
L = -(ylog(a) + (1 - y)log(1 - a)) +$\alpha \sum_{i = 1}^{n} |w_i|$
$\alpha$는 L1 규제의 양을 조절하는 하이퍼파라미터 이다.
예를 들어 보자 $\alpha$의 값이 크다면 전체 손실 함수의 값이 커지지 않도록 w 값의 합이 작아져야 한다
-> 이것을 규제가 강해졌다 (가중치가 작아 졌기 때문에) 라고 한다.
반대로 $\alpha$의 값이 작다면
-> 이것을 규제가 약해졌다 (w의 합이 커져도 손실 함수의 값이 큰 폭으로 커지지 않기 때문에)
이제는 경사 하강법으로 가중치를 업데이트하기 위해서 L1 규제를 적용한 로지스틱 손실 함수를 미분해보자
L1 규제의 미분
이전에 로지스틱 손실 함수를 가중치에 대해 미분해보았으니 계산과정은 생략 하겠다
다만 |w|를 미분하면 w 값의 부호 즉 w가 양수일시 +1, 음수일시 -1이 남기 때문에 w 값을 미분한 결과인 w의 부호라는 의미로 -> sign(w)라고 표현 할 것이다.
$\frac{\delta}{\delta w}L = -(y - a)x + \alpha sign(w)$
이 식은 가중치 벡터 w에 대한 미분으로 확장하여 식을 전개하였다
또한 이 식을 가중치 업데이트 식에 적용하고
L1 규제에 학습률도 적용해 보자 -> L1 규제를 적용한 손실 함수의 도함수에 학습률을 곱하면 됨
$w = w - \eta \frac{\delta L}{\delta w} = w + \eta((y - a)x - \alpha sign(w))$
여기서 $\eta$는 학습률을 나타낸다
위 수식을 보면 L1 규제를 추가한 로지스틱 손실 함수르 경사 하강법으로 최적화 하는것을 생각해 보면 규제 하이퍼파라미터 $\alpha$와 가중치의 부호를 곱해서 갱신할 gradient에 더해주면 된다.
파이썬으로 구현하려면
w_grad += alpha * np.sign(w)
여기서 변수 alpha가 규제 하이퍼파라미터이고, np.sign() 함수는 배열 요소의 부호를 반환한다.
그런데 위 식을 유도해오면서 궁금한 점이 있다..
절편에 대한 규제는 왜 안하지 ????
절편을 잘 생각해보자 절편이 변할때 모델은 어떤 방향으로 이동할지 변할 뿐 모델의 복잡도에는 영향을 주지 않기 떄문이다.
역시 사이킷런에서는 L1 규제를 쉽게 구현할 수 있게 지원해준다.
SGDClassifier 클래스에서 penalty 매개변수 값을 l1으로 지정하면 L1 규제를 적용할 수 있다.
그리고 규제의 강도를 제어하는 하이퍼파라미터 $\alpha$를 위한 alpha 매개변수 또한 제공한다.
라쏘(Lasso) 모델 :
회귀 모델에 L1 규제를 추가한 모델을 라쏘 모델이라고 한다.
회귀 모델에도 같은 원리를 적용하여 손실 함수(제곱 오차)에 L1 규제를 적용할 수 있다.
이러한 모델을 라쏘 모델이라고 부른다.
라쏘 모델은 가중치를 줄이는 것을 넘어 일부 가중치를 0으로도 만들 수 있다.
가중치가 0인 특성은 어떤 의미를 가질까?
-> 모델에서 사용할 수 없다는 것과 같은 의미를 가진다
즉 일부 가중치를 0으로 만들수 있다는 의미는 모델에서 특성을 선택할지 말지 정할 수 있는 효과를 얻는다.
당연하게도 사이킷런에서는 라쏘 모델도 지원한다.
sklearn.linear_model.Lasso 클래스에서 라쏘 모델을 제공한다.
미분 결과에서 L1 규제는 규제 하이퍼파라미터 $\alpha$에 많이 의존함을 알 수 있다.
-> 가중치의 크기에 따라 규제의 양이 변하지 않으므로 규제 효과가 좋다고 할 수는 없다.
이러한 문제점을 해결할 방안이 없을까??
-> L1 규제 보다 규제 효과가 좋은 L2 규제에 대해 알아보자.
L2 규제 :
L2 규제는 손실 함수에 가중치에 대한 L2 노름(norm)의 제곱을 더한다.
L2 norm은 아래와 같이 정의된다.
$||w||2 = \sqrt{\sum{i = 1}^{n} |w_i|^2}$
손실 함수에 L2 norm의 제곱을 더하면 L2 규제가 된다.
L = -(ylog(a) + (1 - y)log(1 - a)) +$\frac{1}{2} \alpha \sum_{i = 1}^{n} |w_i|^2$
여기서 $\alpha$는 L1 규제와 마찬가지로 규제의 양을 조절하기 위한 하이퍼파라미터이다.
$frac{1}{2}$는 나중에 L2 규제를 미분하였을때 결과가 보기 좋게 하기 위해서 추가하였다.
L2 규제의 미분
뭐 L1 규제 미분하듯이 가중치에 대해 미분해 보면
$\frac{\delta}{\delta w}L = -(y - a)x + \alpha w$
L2 규제를 미분하면 위와 같다. 단순히 로지스틱 손실함수를 가중치에 대해 미분한 것에 간단히 가중치 w만 남음을 알 수 있다.
이 결과를 가중치 갱신 업데이트 식에 대입해보자
$w = w - \eta \frac{\delta L}{\delta w} = w + \eta((y - a)x - \alpha w)$
여기서 $\eta$는 L1 규제와 같이 학습률을 나타낸다
L2 규제를 경사 하강법 알고리즘에 적용하는 방법 또한 gradient에 $\alpha$와 가중치의 곱을 더하면 된다.
파이썬으로 구현해 보면
w_grad += alpha * w
자 이러한 L2 규제가 L1 규제보다 어떠한 점이 더 효과적인가??
L2 규제는 gradient 계산에 있어서 가중치의 값 자체가 포함된다.
하지만 L1 규제는 가중치의 부호만 사용된다.
따라서 L2 규제가 L1 규제보다 좀더 효과적이다.
아니 그런데 L2 규제는 가중치를 완전히 0으로 만들지 않잖아 그러면 원하는 특성을 제외하는 즉 모델에서 특성을 선택할지 안할지를 정할 수 없잖아.. 그럼 L1 규제 (라쏘 모델) 에 비해 이점은 안좋은거 아닌가??
-> 가중치를 완전히 0으로 만들 수 있으면 특성을 제외하는 즉 선택할 수 있는 효과는 보지만 대신 모델의 복잡도가 떨어지게 된다.
즉 장단점이 있는거다. 여러가지를 따져 봤을때 L2 규제를 널리 사용한다.
릿지(Ridge) 모델 :
회귀 모델에 L2 규제를 적용한 것을 릿지 모델이라고 한다.
당연하게도 L2 릿지 모델 또한 사이킷런에서 제공한다.
sklearn.linear_model.Ridge 클래스로 제공을 한다.
SGDClassifier 클래스에서는 매개 변수인 penalty를 l2로 지정하여 L2 규제를 추가할 수 있다.
두 클래스 모두 규제의 강도는 매개 변수 alpha로 제어한다.
로지스틱 회귀에 규제를 적용해보자
자 이젠 이전에 만든 SingleLayer 클래스에 L1 규제와 L2 규제를 적용해보자.
실무에서는 L1 규제보단 L2 규제를 주로 사용한다고 하는데 왜 그런지 이번 예제를 통해 두 규제의 차이를 느껴보자.
# gradient 업데이트 수식에 패널티 항을 반영해 보자
import numpy as np
class SingleLayer:
# L1 규제와 L2 규제의 강도를 조절하는 매개변수 l1, l2를 __init__() 메서드에 추가한다.
def __init__(self, learning_rate = 0.1, l1 = 0, l2 = 0): # l1과 l2의 기본값은 0이고 이때는 규제 적용 하지 않음
self.w = None
self.b = None
self.losses = []
self.val_losses = []
self.w_history = []
self.lr = learning_rate
self.l1 = l1
self.l2 = l2
def forpass(self, x):
z = np.sum(x * self.w) + self.b
return z
def backprop(self, x, err):
w_grad = x * err
b_grad = 1 * err
return w_grad, b_grad
def activation(self, z):
z = np.clip(z, -100, None)
a = 1 / (1 + np.exp(-z))
return a
def fit(self, x, y, epochs = 100, x_val = None, y_val = None):
self.w = np.ones(x.shape[1])
self.b = 0
self.w_history.append(self.w.copy())
np.random.seed(42)
for i in range (epochs):
loss = 0
indexes = np.random.permutation(np.arange(len(x)))
for i in indexes:
z = self.forpass(x[i])
a = self.activation(z)
err = -(y[i] - a)
w_grad, b_grad = self.backprop(x[i], err)
# 가중치 gradient에서 패널티 항의 미분값을 더한다
# 이때 L1 규제와 L2 규제를 따로 적용하지 않고 하나의 식으로 작성했다.
# (L1 규제, L2 규제 동시에 수행 가능)
w_grad += self.l1 * np.sign(self.w) + self.l2 * self.w
self.w -= self.lr * w_grad
self.b -= b_grad
self.w_history.append(self.w.copy())
a = np.clip(a, 1e-10, 1 - 1e-10)
loss += -(y[i] * np.log(a) + (1 - y[i]) * np.log(1 - a))
self.losses.append(loss/len(y) + self.reg_loss()) # self.reg_loss() 추가
self.update_val_loss(x_val, y_val)
def predict(self, x):
z = [self.forpass(x_i) for x_i in x]
return np.array(z) >= 0
# 검증 세트의 손실을 계산하는 update_val_loss() 메서드에서 reg_loss()를 호출하도록 수정하자
def update_val_loss(self, x_val, y_val):
if x_val is None:
return
val_loss = 0
for i in range(len(x_val)):
z = self.forpass(x_val[i])
a = self.activation(z)
a = np.clip(a, 1e-10, 1 - 1e-10)
val_loss += -(y_val[i] * np.log(a) + (1 - y_val[i]) * np.log(1 - a))
self.val_losses.append(val_loss / len(y_val) + self.reg_loss()) # -> reg_loss() 호출하도록 수정
def score(self, x, y):
return np.mean(self.predict(x) == y)
# 로지스틱 손실 함수 계산에 패널티 항을 추가해보자
# 로지스틱 손실 함수를 계산할 때 패널티 항에 대한 값을 더해야함.
# 이를 위해서 reg_loss() 메서드를 SingleLayer 클래스에 추가함.
# 이 함수는 훈련 세트의 로지스틱 손실 함수의 값과 검증 세트의 로지스틱 손실 함수의 값을 계산할 때 모두 호출됨
def reg_loss(self):
return self.l1 * np.sum(np.abs(self.w)) + self.l2 / 2 * np.sum(self.w ** 2)
# 이제 먼제 L1 규제를 추가하여 로지스틱 회귀 모델을 훈련해보자
# cancer 데이터 세트에 L1 규제를 적용하고자 한다.
from sklearn.datasets import load_breast_cancer
from sklearn.model_selection import train_test_split
import matplotlib.pyplot as plt
cancer = load_breast_cancer()
x = cancer.data
y = cancer.target
x_train_all, x_test, y_train_all, y_test = train_test_split(x, y, stratify = y, test_size = 0.2, random_state = 42)
x_train, x_val, y_train, y_val = train_test_split(x_train_all, y_train_all, stratify = y_train_all, test_size = 0.2, random_state = 42)
train_mean = np.mean(x_train, axis = 0)
train_std = np.std(x_train, axis = 0)
x_train_scaled = (x_train - train_mean) / train_std
val_mean = np.mean(x_val, axis = 0)
val_std = np.std(x_val, axis = 0)
x_val_scaled = (x_val - val_mean) / val_std
x_val_scaled = (x_val - train_mean) / train_std
# L1 규제의 강도에 따라 모델의 학습 곡선과 가중치가 어떻게 바뀌는지 알기 위해
# 규제 강도를 0.0001, 0.001, 0.01 세 가지에 대해 확인해 보자
l1_list = [0.0001, 0.001, 0.01]
for l1 in l1_list:
lyr = SingleLayer(l1 = l1)
lyr.fit(x_train_scaled, y_train, x_val = x_val_scaled, y_val = y_val)
plt.plot(lyr.losses)
plt.plot(lyr.val_losses)
plt.title("Learning Curve (l1={})".format(l1))
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train_loss', 'val_loss'])
plt.ylim(0, 0.3)
plt.show()
plt.plot(lyr.w, 'bo')
plt.title('Weight (l1 = {})'.format(l1))
plt.ylabel('value')
plt.xlabel('weight')
plt.ylim(-4, 4)
plt.show()
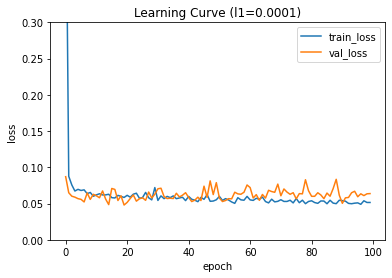
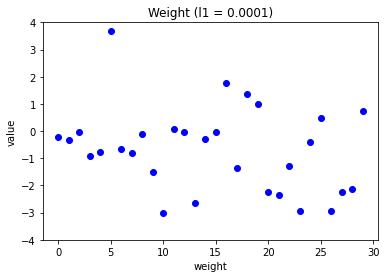
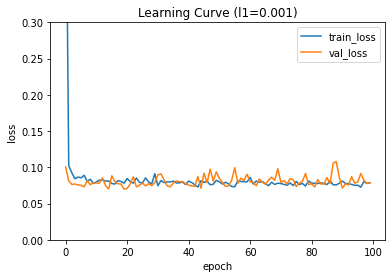
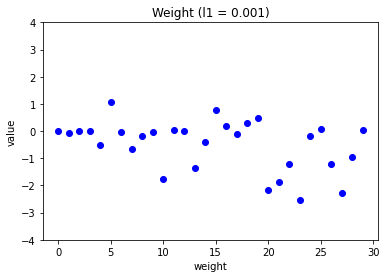
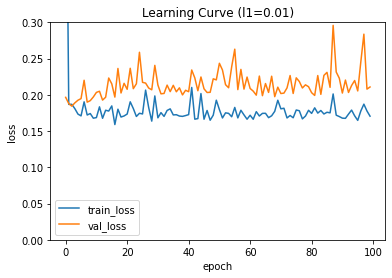
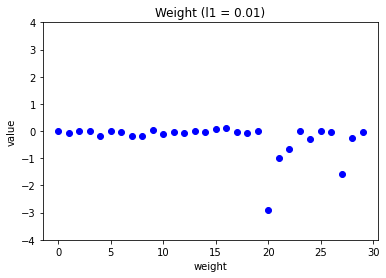
각 그래프들을 보면 꺾은선 그래프는 학습 곡선 그래프이고 산점도는 가중치에 대한 그래프 이다.
학습 곡선 그래프를 보면 규제가 더 커질수록 훈련 세트의 손실과 검증 세트의 손실 모두 높아지는 것을 확인 가능하다.
즉 과소 적합 현상이 나타난다.
가중치 그래프를 보면 규제 강도 l1 값이 커질수록 가중치의 값이 0에 가까워지는 것을 확인할 수 있다.
그래프를 보면 적절한 l1 하이퍼파라미터 값은 0.001로 보인다.
따라서 이 값을 이용하여 모델의 성능 확인해 보겠다.
layer5 = SingleLayer(l1 = 0.001)
layer5.fit(x_train_scaled, y_train, epochs = 20)
layer5.score(x_val_scaled, y_val)
# 결과를 확인해보니 규제를 적용하지 않고 검증 세트로 성능을 평가했던 결과와 똑같은 정확도를 보인다.
# 그럼 굳이 왜 L1 규제를 했지??
# 사실 이번에 적용한 데이터 세트의 크기가 작기 때문에 L1 규제의 효과가 크게 나타나지 않은 것이다.
0.978021978021978
# 이제는 L2 규제를 적용해 보자
# cancer 데이터 세트에 L2 규제를 적용해 보자
l2_list = [0.0001, 0.001, 0.01]
for l2 in l2_list:
lyr = SingleLayer(l2 = l2)
lyr.fit(x_train_scaled, y_train, x_val = x_val_scaled, y_val = y_val)
plt.plot(lyr.losses)
plt.plot(lyr.val_losses)
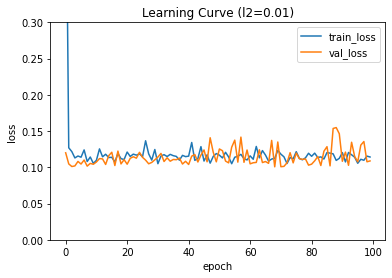
plt.title("Learning Curve (l2={})".format(l2))
plt.ylabel('loss')
plt.xlabel('epoch')
plt.legend(['train_loss', 'val_loss'])
plt.ylim(0, 0.3)
plt.show()
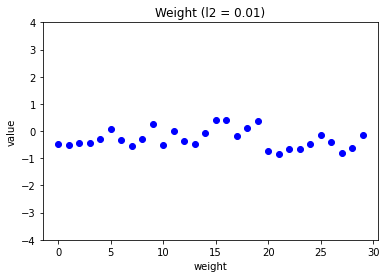
plt.plot(lyr.w, 'bo')
plt.title('Weight (l2 = {})'.format(l2))
plt.ylabel('value')
plt.xlabel('weight')
plt.ylim(-4, 4)
plt.show()
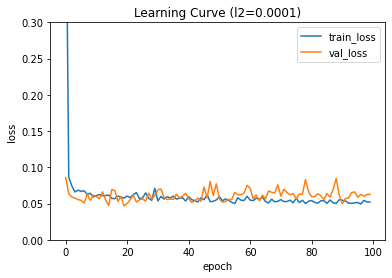
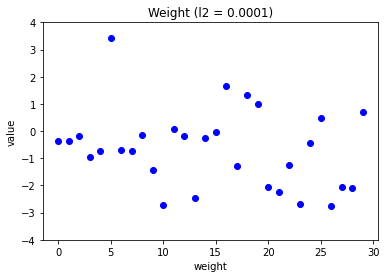
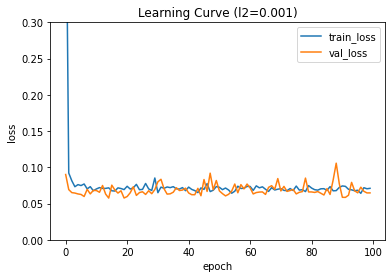
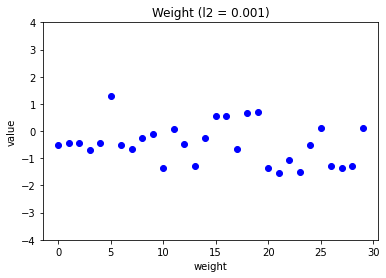
두 그래프를 보면 L2 규제 또한 L1 규제와 비슷한 양상을 보이는 것을 알 수 있다.
그런데 마지막 학습 곡선 그래프를 보자 (L2 = 0.01)
L2 규제는 규제 강도가 강해져도 L1 규제에 비해 과소 적합이 심해지지는 않는 것으로 보인다.
또한 가중치 그래프를 보아도 가중치가 0에 매우 가깝게 줄어들지는 않는다는 것도 확인할 수 있다.
# L2 규제를 적용한 모델은 50 epoch 횟수만큼 훈련하고 성능을 확인해 보자
# 이 때는 l2 = 0.01 의 규제 강도에 대해 적용해 보겠다.
layer6 = SingleLayer(l2 = 0.01)
layer6.fit(x_train_scaled, y_train, epochs = 50)
layer6.score(x_val_scaled, y_val)
# 성능을 보니 정확도가 L1 규제와 같다..
# -> L1 규제를 한 모델이나 L2 규제를 한 모델이나 성능이 큰 차이가 없다.
# 즉 두 모델 모두 검증 샘플에 대해 예측한 샘플이 똑같다.(정확하게 예측한 샘플 수가 동일)
0.978021978021978
np.sum(layer6.predict(x_val_scaled) == y_val)
# 총 91개 샘플 중 89개를 맞춘 것이다.
89
위 결과를 보면 L1 규제를 쓰나 L2 규제를 쓰나 같은 결과가 나왔다.
하지만 L1 규제를 썼을때 보다 L2 규제를 썼을때 epoch가 크게 늘어났다.
L1 규제는 20번의 epoch 동안 훈련 했지만 L2 규제의 경우 50번의 epoch 동안 훈련을 했다.
그 이유는 L2 규제의 경우 가중치를 강하게 제한했기 때문에 알고리즘이 검증 세트의 손실값을 일정 수준으로 유지하면서 전역 최솟값을 찾는 과정을 오래 반복할 수 있었기 때문이다.
이전에 말했듯 사이킷런에서 L1 규제와 L2 규제를 지원한다고 하였다.
사이킷런을 이용해 L1, L2 규제를 사용해보자
# SGDClassifier에서 규제를 사용해 보자
# 매개변수 penalt에 l1 이나 l2를 매개변수 값으로 전달하고
# 매개변수 alpha를 통해 규제의 강도를 정하면 된다.
from sklearn.linear_model import SGDClassifier
# L2 규제로, 규제의 강도는 alpha = 0.001로 모델을 만들자
sgd = SGDClassifier(loss='log', penalty='l2', alpha=0.001, random_state=42)
sgd.fit(x_train_scaled, y_train)
sgd.score(x_val_scaled, y_val)
# 이 경우에 당연히 위의 결과와 같다.
0.978021978021978
사이킷런에서는 SGDClassifier 클래스 말고도 L1, L2 규제를 제공하는 모델이 많다.
ex) LogisticRegression, SVC, LinearSVC 클래스 등등
이 클래스들은 매개변수 penalty 대신 주손실 함수의 크기를 조절하기 위해 하이퍼파라미터 C를 제공한다.
(SGDClassifier 클래스에서 매개변수 alpha를 사용하여 규제를 제어하는 것과 유사)
-> 이때 C는 alpha와 반대의 역할을 한다.
매개변수 C가 커지면 규제가 줄고 C가 작으면 규제가 강해지는 것이다.
지금까지 L1, L2 규제에 대해 알아보았다.
다음에는 훈련 노하우 중 교차 검증에 대해 알아볼 것이다. 이 검증 방법은 전체 데이터 세트의 샘플 수가 적을때 사용할 수 있는 방법니다.
Reference
박해선, 딥러닝 입문, 이지스퍼블리싱, 2019, 137 ~ 148pg